品川秋太郎さんが優秀研究奨励賞を受賞しました 2024-03-13 On: 2024-03-13 演題名:イヌが用いる 2種類のギャロップのシンプルモデルによるパラメータ依存性解析 共著者:上村知也,安達真永,佐野明人,松野文俊 第36回 自律分散システム・シンポジウム
第29回未踏IT人材発掘・育成事業成果報告会に参加しました 2023-02-20 On: 2023-02-20 北道広大さん、村山大騎さん、鶴岡萌㮈さん、中村優真さんがMITOU2022Demo Day/第29回未踏IT人材発掘・育成事業成果報告会に参加しました。 Youtubeはこちら 4:24:53あたりから発表です
上村知也助教が、SICE中部支部激励賞を受賞しました 2023-02-16 On: 2023-02-16 題目:全身の受動的な動力学を活用してヒトや動物に近い歩行・走行を実現する脚移動ロボット SICE中部 第53期受賞者 style=”width:30%;”
上村知也助教がNHK「ダーウィンが来た!」に出演しました 2023-01-19 On: 2023-01-19 2023.1.8放送の ダーウィンが来た!「お正月特集 激レア!?日本のウサギ大捜索」に上村知也助教が出演しました。 ダーウィンが来た!
2022.12 SI2022にて発表を行いました 2022-12-16 On: 2022-12-16 SI2022 第23回計測自動制御学会システムインテグレーション部門講演会 2022.12.14~2022.12.16 屋外走行に向けた2足走行ロボットに関する研究 名工大 ○佐藤 滉大、藤原 祐太、西飯
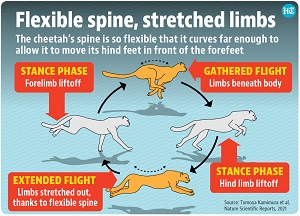
2022.9 上村知也助教がHindustan Timesから取材を受けました 2022-09-21 On: 2022-09-21 上村知也助教がインドの新聞社であるHindustan Timesから取材を受け、 記事が掲載されました。 Where the cheetah’s speed comes from
2022.9 第40回日本ロボット学会学術講演会で発表しました。 2022-09-09 On: 2022-09-09 川瀬菜々子さん、佐藤滉大さん、藤原祐太さん、村山大騎さん、日下昂大さん、櫻井祐輔さんが第40回日本ロボット学会学術講演会で発表しました。 第40回日本ロボット学会学術講演会 2022年9月5日(月)~2022年
2022年度未踏IT人材発掘・育成事業公募にて採択されました。 2022-06-09 On: 2022-06-09 北道広大さん、村山大騎さん、鶴岡萌㮈さん、中村優真さんが、2022年度未踏IT人材発掘・育成事業公募にて採択されました。 〇2022年度未踏IT人材発掘・育成事業公募結果について
2022.6 Robomech2022で発表を行いました。 2022-06-09 On: 2022-06-09 上村知也助教、中村優真さんが、ロボティクス・メカトロニクス 講演会 2022 in Sapporo(Robomech2022)で発表を行いました。 【発表内容】 ◎上村知也, 佐野明人, 揺動慣性を持つコンパス
2022.5.佐野明人教授が、本学の特別褒賞を受賞しました。 2022-05-26 On: 2022-05-26 名古屋工業大学は、令和4年度科学技術分野の文部科学大臣表彰科学技術賞を受賞した佐野明人教授に対して、特に優れた業績を挙げたことを認め、特別褒賞を授与しました。 名古屋工業大学ニュース