Basic Research for the future
- 概要
本研究は、皮膚の内部にある触覚に関する受容器(機械受容器)の解明されていない発生過程と空間配置を調べることを目的としています。得られた知識は、微細な触覚センサを高密度に製作することや高感度なセンサカバーを効果的に設計することなどへの応用が期待されます。
- 背景
皮膚は主に三層(表皮、真皮、皮下組織)に分かれており、それぞれに機械受容器が配置されています。速順応I型機械受容器(RA-I)と呼ばれる受容器は人間の触覚にとって重要であり、微小な肌の変動を起こす刺激(凸凹、滑り、低周波振動等)を検出しています。人間の触覚を詳しく理解することは触覚センサのデザインにとって重要なヒントとなりますが、RA-Iの発生過程と空間配置は、どちらもまだ十分に解明されていません。
- 研究の成果
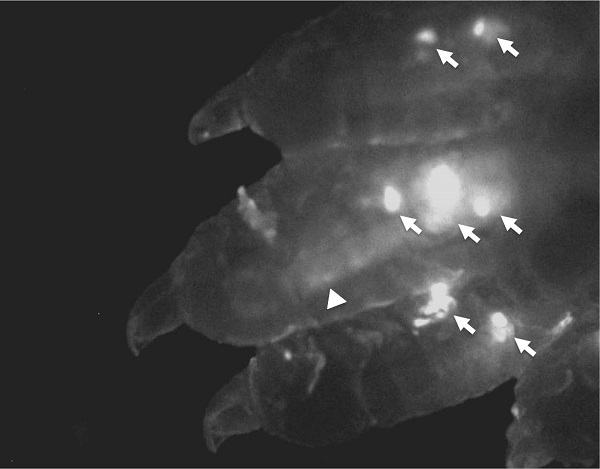
我々は新しい観察方法を開発し、従来手法では不可能であった、生きたままのマウスでRA-Iの発生過程を継続的に観察することに成功しました。また、RA-I周辺の構造によって対象物の形状認識が助けられている可能性があることや、触覚情報が脳に伝わる前に情報処理される際、皮膚内部に巡っている神経の配線が役立つと考えられることが分かりました。
- 特徴
発生過程を解明し、解剖学的方法と空間配置の影響を検討するためにシミュレーションを用いました。
- 研究の未来
上で述べた発見は触覚センサの弾性カバーの改善につながり、将来製作したいと考えています。また、本研究のアプローチを他の機械受容器に導入することで、さらに新たな知識を発見し、触覚技術に応用できる可能性が期待されます。
Project member: Pham Quang Trung
The high-level understanding of human tactile sensing is convinced to provide important hints for tactile sensor design by which raises the level of tactile sensitivity and acuity of robots to human range. This study was motivated by the idea to look for such hints through investigating the poorly known generation process and spatial configuration of tactile receptors. Our approach includes both anatomical method for investigating the generation process of RA-I receptors and simulation method for investigating the effect of spatial configuration on them.
We have successfully developed a novel method allows us to repeatedly observe the development of RA-I (one kind of mechanoreceptors in skin) on the same living mouse, which is not possible in traditional methods. We have also developed a finite-element model of skin, which mimic the three-dimensional configuration of dermal papillae (the location where the RA-I receptor distributed). Simulation results demonstrate that the mechanical response at RA-I receptor appears to help discerning the spatial configuration of similar indenters. An extended simulation also revealed the role of neural branching method in signal pre-processing process at the receptor level.
In future works, we expect to find the potential use of this knowledge in producing micro tactile sensors more densely and designing high-sensitive sensor cover more effectively.
Comments are closed, but trackbacks and pingbacks are open.