Flexible tactile sensor
- 概要
皮膚は主に表皮、真皮、皮下組織の3層で構成されていますが、その中でも私たちは特に皮下組織に着目しています。皮下組織の構造を応用することで、高感度で柔らかい触覚センサの開発を行っています。
- 背景
人とロボットが共生する期待が高まっており、ロボット用の触覚センサの開発が進められています。しかし、従来の触覚センサでは柔軟性、検出領域、耐久性と言った課題があります。一方,近年の研究で、皮下組織内のコラーゲン線維の構造が触覚の感度を上昇させることが示されました。皮下組織の構造をセンサに応用することができれば、柔軟かつ深部まで高感度なセンサを作ることができるのではないかと考えました。
- 研究の成果
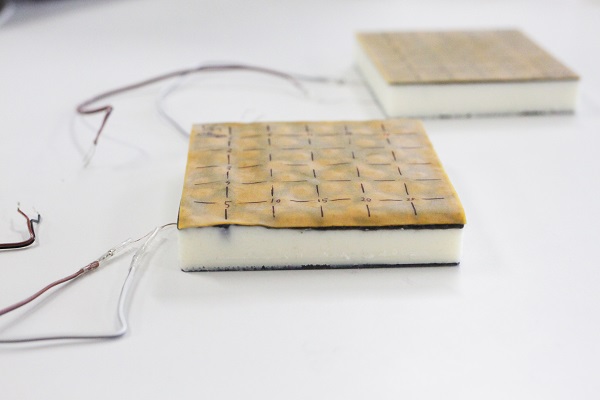
サル指断面の観察をもとに、皮下組織の構造を利用した柔軟な触覚センサを試作しました。
- 特徴
この触覚センサは皮膚のように柔らかい素材で作られています.また,深い位置にセンサを埋め込むことが可能なので耐久性に優れ、1つのセンサで広範囲を検出することが可能です。
- 研究の未来
皮膚のように柔らかい触覚センサを実現することができれば、ヒューマノイドロボットなどに応用することも可能になります。人とロボットが安全に触れ合える未来を目指して研究をすすめています.
Project members: 西澤順平 園井悠人
Comments are closed, but trackbacks and pingbacks are open.